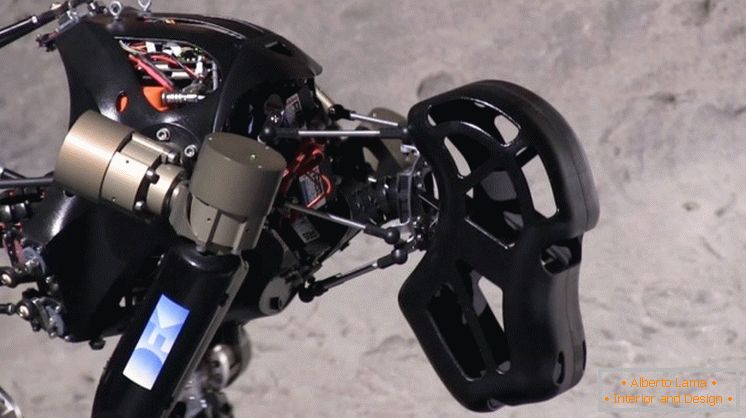
Nemški raziskovalni center za umetno inteligenco (DFKI) in Univerza v Bremnu delata na Simijevem robotu iStruct Demonstrator, ki je razvrščen kot "vesoljski robot". Zdaj mehanske opice opravijo preizkuse za hojo in ravnotežje v okoliščinah, ki so blizu reliefu lune.

Študija nevarnih površin v lunah zahteva uporabo različnih oblik gibanja, raziskovalci iz DFKI pa preučujejo svoje sposobnosti (vključno s kombinacijo nog, koles in goseničarjev). Opičji podobni roboti imajo določene prednosti v primerjavi s kolesom, s štirimi točkami pa vam omogoča, da ustvarite bolj stabilen položaj pri plezanju skozi ovire ali hribovit teren. Robot lahko ravna na njenih zadnjih nogah, da sprosti prednje noge, da izvede katero koli dejanje.

Z novimi mednarodnimi interesi v lunarni misiji obstaja možnost, da iStruct (ali eden njegovih potomcev) lahko obišče Luno. Kolonizacija Lune z roboti se bo začela z razvojem, ki se lahko razvije in se ustrezno odzove v vseh trenutnih razmerah. V zvezi s tem je cilj projekta graditi "napredne umetne inteligence" in robotski sistem, ki se lahko učijo in navigirajo.
Robot ima ukrivljeno hrbtenico, ki povezuje prtljažnik in medenico, kar ji daje večjo fleksibilnost, kot tudi senzor obremenitve stopala in gležnja, ki reagirajo v stiku s tlemi.
Druge funkcije vključujejo:
- 43 neodvisnih motorjev;
- Šest dodatnih senzorjev FSR na odprtih delih za odkrivanje ovir;
- 6-osni senzor vrtilnega momenta;
- Digitalni 3-osni merilnik pospeška, da zaznavajo usmerjenost stopala v vesolje;
- Dva temperaturna senzorja za kompenzacijo temperaturnih sprememb v elektroniki;
- Digitalni magnetni senzor za kotni nadzor vsake premične osi stopala in gležnja;
Večina robotov že vsebuje veliko teh senzorjev, toda zgibana iStructova hrbtenica (ki deluje kot 6-osni pretvornik navora) je neke vrste redkost za lokomotorne robote, ki pomagajo pri gibanju na vseh štirih. Senzorji v stopalih in gležnjah omogočajo, da ohranja ravnotežje na nagnjeni površini.
V letih 2008 in 2009 je diplomirani inženir Daniel Kuhn delal na podobnem robotu. Majhna opica, ki je bila sposobna preproste štiri noge hoje. Po tem projektu je začel delati na iStructu, ki ima številne pomembne posodobitve. To je veliko večja teža, 18 kg (40 kilogramov) in dimenzije 66 x 43 x 75 cm (26 x 17 x 29 palcev), prav tako pa vsebuje 26 stopinj svobode in poganjajo različni električni motorji. Projekt je treba zaključiti avgusta letos.
Vidite, kako uporablja svoje intelektualne noge in gležnje pri hoji in vzdrževanju ravnovesja v spodnjem videu. To je majhen korak za opojnega robota, vendar potencialno velik korak za vse robotike podobnega oblikovanja.
Hoja
Balansiranje
Fotogalerija Skupaj | 14 slik